Minimal Communication between Drones Using Guidance Vector Fields in Dense Airspace
Abstract
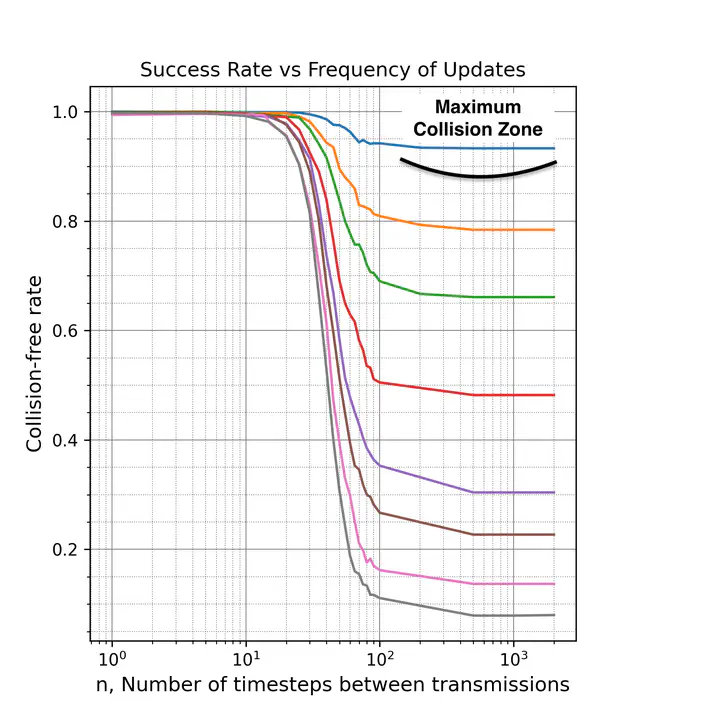
In response to escalating drone traffic, this paper investigates the interplay between drone density, communication frequency, and collision avoidance. We utilize artificial potential fields as a guidance mechanism for drones navigating in dense airspace. Through numerical simulations involving two to nine drones, we analyze how communication frequency correlates with collision rates as drone density increases. Our findings reveal the nuanced relationship between these variables, showing that communication frequency requirements increase with drone density for collision-free navigation. Furthermore, we present a theoretical framework predicting the relationship between drone density and the minimal communication frequency required for safe operations. We also demonstrate a simple experiment in the flying arena to highlight the influence of the rate of positional information sharing on the paths taken by drones.
Adrian DEL-SER
Research Engineer
My research interests include robotics, deconfliction, detect and avoid problems.
Murat BRONZ
Assistant Prof. of Dynamic Systems and Head of Drones and UTM Research Chair
My research interests include all sorts of aerial robotics related subjects.