Investigating Cyclic Airspace Corridor Optimizationfor UAS Traffic Management based on DeepReinforcement Learning
Abstract
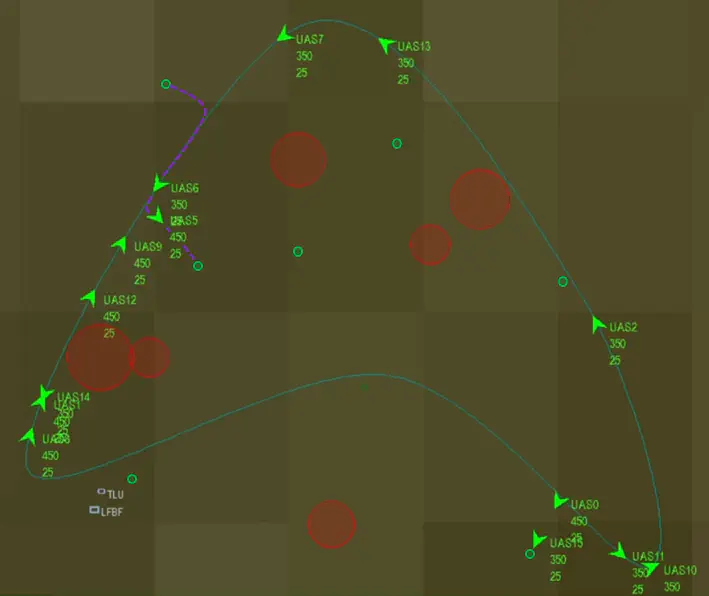
As drone traffic increases in urban and subur-ban environments, more complex airspace structures will berequired to accommodate rising demand. Unmanned AircraftSystem (UAS) Traffic Management (UTM) service providers riskbecoming overwhelmed by the time and resource demands ofgranting flight authorizations, for both human and automatedsystems. This research proposes the Cyclic Corridor Concept (C$^3$) a strategic, centralized UTM service architecture designedto offload flight planning trade-offs. The C3introduces twovertically separated, unidirectional cyclic corridors within VeryLow Level (VLL) airspace. These corridors loop clockwiseand counterclockwise through urban areas, passing close tomultiple vertiports to ensure fair access and enhance operationalefficiency in congested airspace. We investigate the use of Rein-forcement Learning (RL) to optimize the corridor’s trajectory,accounting for urban constraints such as no-fly zones derivedfrom risk assessments. The proposed method rapidly generatesfeasible solutions under diverse airspace configurations, enablingnear real-time applicability. Results highlight the benefits ofC3in reducing UTM provider workload as vertiport networkcomplexity increases. The system generates visually intuitive andsafe corridors, reducing the need for strategic deconfliction andrerouting. Although the C3design may incur additional traveldistance, this is offset by faster flight authorizations and moreevenly distributed delays across dense traffic flows
Rodolphe FREMOND
AI/ML & UTM Researcher
Expert in Machine Learning for Conflict Resolution, UTM Services Integration, and Digital Twin Technology.
Matthieu Verdoucq
Swarm Systems & UTM Researcher
After a PhD on creating a bio-inspired model for collective motion in a swarm of drones, I now study the use of UAV in tomorrow’s sky, and how to make it efficient and resilient at large scale.
Zeynep BILGIN
PhD Candidate/Researcher
My research interests are guidance and navigation for multiple aerial vehicles.
Murat BRONZ
Assistant Prof. of Dynamic Systems and Head of Drones and UTM Research Chair
My research interests include all sorts of aerial robotics related subjects.