Hybrid Real-Simulated Validation of Separation Assurance and Vector Field Guidance for Safe and Conformant Airspace Corridor Integration
Abstract
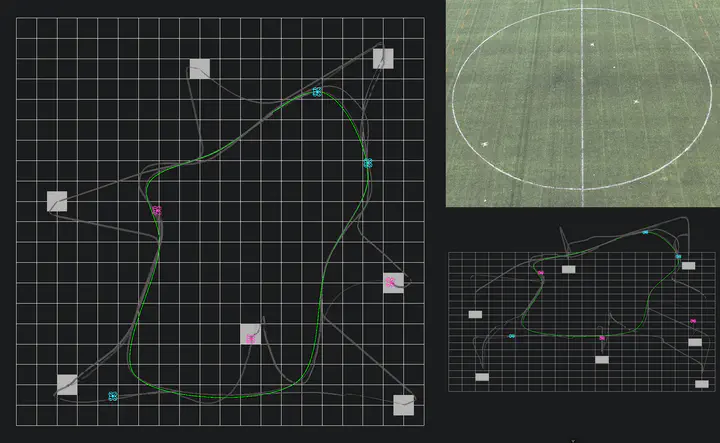
To accommodate increasing demand for Unmanned Aircraft System (UAS) operations, UAS Traffic Management(UTM) systems must evolve to efficiently scale with higher trafficdensities. At this stage, such evolution requires validation with real-world data and testing under realistic operational conditions. Current U-Space approaches ensure safety primarily through spatial and temporal allocation of operational volumes for flight plan authorisation; however, future scalability may require more dynamic flow management models. This paper presents a hybrid real-simulated demonstration, generalisable for dimensionless scaling operations, of a shared airspace corridor where autonomous UAS follow a Guiding Vector Field (GVF), used for both path-following inside the corridor and smooth entry transitions from vertiports. It is complemented by a hybrid safety and centralised architecture that combines Control Barrier Function (CBF) regulating UAS speed for separation assurance, with an Artificial Potential Field (APF) algorithm for reactive collision avoidance. Deployed in a hybrid real-simulated environment across 88 missions, including over 30 real-world flights, our framework successfully managed continuous, efficient and safe operations within a network of 7 vertiports, supporting up to 6 simultaneous operations inside a 20 × 20 metres shared cyclic corridor scenario with reliable path conformance.
Rodolphe FREMOND
AI/ML & UTM Researcher
Expert in Machine Learning for Conflict Resolution, UTM Services Integration, and Digital Twin Technology.
Matthieu Verdoucq
Swarm Systems & UTM Researcher
After a PhD on creating a bio-inspired model for collective motion in a swarm of drones, I now study the use of UAV in tomorrow’s sky, and how to make it efficient and resilient at large scale.
Pierre Mazurier
Research Engineer
Pierre Mazurier is a Research Engineer at ENAC, responsible for developing a web-based visualization platform to support the team’s algorithms and research activities.
Murat BRONZ
Assistant Prof. of Dynamic Systems and Head of Drones and UTM Research Chair
My research interests include all sorts of aerial robotics related subjects.